![[Return to Physics Homepage]](./../../physics.gif)
![[Return to Mike Coombes' Homepage]](./../../coombes.gif)
![[Return to List of Handouts]](./../../handouts.gif)
![[Return to Problem Sets]](./../../problems.gif)
![[Return to List of Solutions]](./../../solutions.gif)
Questions: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
where distance is measured in metres and time in seconds.
(a) What is the amplitude, frequency, angular frequency, and period
of this motion?
(b) What is the equation of the velocity of this particle?
(c) What is the equation of the acceleration of this particle?
(d) What is the spring constant?
(e) At what next time t > 0, will the object be:
(a) First write the general expression on top of the given expression
| x = Acos(ωt + ϕ0 ) |
| x = 4cos(1.33t + π/5) |
Immediately, we get A = 4 m, ω = 1.33 rad/s,
and ϕ0 = π/5.
Since ω = 2π / T
= 2πf, we get T = 2π
/1.33 rad/s = 4.724 s, and f = ω
/ 2π = 0.2117 s−1.
(b) The velocity is given by the first derivative of position with respect to time
With the given values, we get
(c) The acceleration is given by the second of position with respect to time, or the first derivative of the velocity with respect to time,
With the given values, we get
(d) We have the relation that ω2 = K/m, so
(e) (i) & (ii) We know that at equilibrium x = 0. We also know that there are two places where this happens, one where is the velocity is positive and the object is moving to the right, and one where the velocity is negative and the object is moving to the left. So first let's set x = 0,
We can divide through by 4, and we get
Taking the inverse of both sides, the solution is
and thus,
Now cos−1(0) has many solutions, all the
angles in radians for which the cosine is zero. This occurs for
angles θ = π/2,
θ = −π/2,
θ = 3π/2,
θ = −3π/2,
and so on. This is usually expressed
So our solutions for t are in the form
The first nonzero time when x = 0 occurs for n = +1,
The second nonzero time occurs when n = +2,
To tell which has the object moving to the right
and which to the left we examine the velocity
We see that the object is moving to the left, has
negative velocity, at t = t1 = 0.7086 s, and is moving
to the right at t = t2 = 3.0707 s.
(iii) At maximum amplitude, x = +4, so we have
Dividing through by 4, we get
Taking the inverse of both sides, the solution is
and thus,
Now cos−1(1) has many solutions, all the
angles in radians for which the cosine is plus one. This occurs
for angles θ = 0,
θ = 2π,
θ = −2π,
θ = 4π,
θ = −4π,
and so on. This is usually expressed
So our solutions for t are in the form
The first nonzero time when x = +4 occurs for n = +1,
(iv) At minimum amplitude, x = −4, so we have
Dividing through by 4, we get
Taking the inverse of both sides, the solution is
and thus,
Now cos−1(−1) has many solutions, all
the angles in radians for which the cosine is negative one. This
occurs for angles
θ = π,
θ = −π,
θ = 3π,
θ = −3π,
and so on. This is usually expressed
So our solutions for t are in the form
The first nonzero time when x = −4 occurs for n = +1,
Our answers for (e) are thus
| (i) | t = 3.071 s, |
| (ii) | t = 0.709 s, |
| (iii) | t = 4.25 s, and |
| (iv) | t = 1.89 s. |
Alternate Quicker Method Using Reference Circle
An alternate way of solving this problem is to consult the reference circle for a particle undergoing uniform circular motion with radius A. The x-component of the particle's position, tangential velocity, and centripetal acceleration obey the equations of SHM. At t = 0, the reference circle looks like the top diagram (a) shown below. Note that the x components of the vector indicates that at t = 0, x(0) > 0, v(0) < 0, and a(0) < 0.
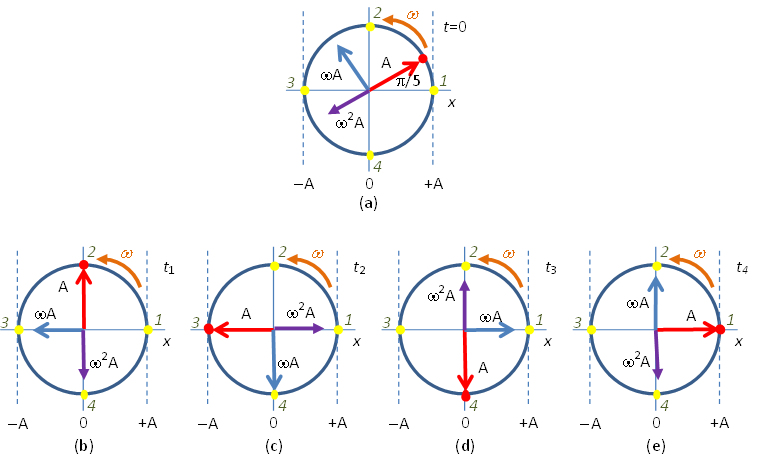
Now as we rotate counterclockwise with increasing time, there are four points of interest labelled 1, 2, 3, and 4 in the diagrams. These are the points where the object is farthest to the right, moving to the left through equilibrium, farthest to the left, and moving to the right through equilibrium respectively.
The object on the spring, or equivalently the particle undergoing UCM, passes through points 2, 3, 4, and 1 in that order. These are shown as times t1, t2, t3, and t4 in diagrams (b), (c), (d), and (e) in the figure above.
The figure (b) reference circle is for v = −ωA. We have rotated from the t = 0 position of π/5 to π/2 an angle of 90° − 36° = 54°. Since a 360° rotation takes one period T, then the time required to get to here was given by the ratio t1/T = 54°/360°. Solving we find t1 = 54/360 × 4.724 s = 0.709 s.
The figure (c) reference circle is for x = −A. We have rotated from the t = 0 position of π/5 to π an angle of 180° − 36° = 144°. Since a 360° rotation takes one period T, then the time required to get to here was given by the ratio t2/T = 144°/360°. Solving we find t2 = 144/360 × 4.724 s = 1.890 s.
The figure (d) reference circle is for v = +ωA. We have rotated from the t = 0 position of π/5 to 3π/2 an angle of 270° − 36° = 234°. Since a 360° rotation takes one period T, then the time required to get to here was given by the ratio t3/T = 234°/360°. Solving we find t3 = 234/360 × 4.724 s = 3.071 s.
The figure (e) reference circle is for x = +A. We have rotated from the t = 0 position of π/5 to 2π an angle of 360° − 36° = 324°. Since a 360° rotation takes one period T, then the time required to get to here was given by the ratio t2/T = 324°/360°. Solving we find t4 = 324/360 × 4.724 s = 4.252 s.
Our answers for (e) are thus
| (i) | t = 3.071 s, |
| (ii) | t = 0.709 s, |
| (iii) | t = 4.252 s, and |
| (iv) | t = 1.890 s. |
![[Return to Top of Page]](./../../top.gif)
Simple Harmonic Motion is independent of amplitude.
Our answers to Question #1 would not change.
The potential energy is spring potential energy and
is given by U = ½Kx2, so
The kinetic energy is given by K = ½mv2, so
The total energy is the sum of potential and kinetic
energies,

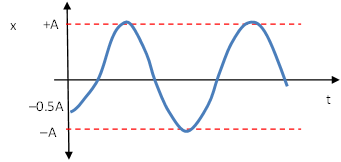
Examining the graph we see that the largest displacement is 10 cm, so A = 0.10 m. We also see that the motion repeats every 0.2 seconds, so T = 0.2 s. Angular frequency is related to the period by ω = 2π/T, so ω = 10π.
At t = 0, we can read from the side of the graph that x = -7.5 cm = -0.075 m. The negative x position puts the object at either quadrant II or III of the reference circle. To decide which quadrant is correct, note that as t increases the curve goes through zero (equilibrium), labelled point A in the diagram, and it is moving from negative to positive position so it is moving to the right. This is the behaviour of the particle in quadrant III, so the reference circle looks like

We can take the general equation, x = Acos(ωt + ϕ0) and substitute in the t = 0 values to find ϕ0.
which reduces to
or
Remember that your calculator will only give you one answer but there is also a second answer 360° minus the calulator answer.
Solving yields 138.6° (2.419 rad) or 221.4° (3.864 rad). The second answer is in the third quadrant and is thus the correct phase constant.
The equation of the displacement is
An examination of our relationships for SHM indicates that K = ω2m, E = ½KA2, vmax = ωA, and amax = ω2A, so
To find when the object is moving to the right at equilibrium (labelled A in the given x-t graph), note that this is point 3 on the reference circle given above. So the object needs to rotate to 270° from 221.4°. Since rotating 360° takes one period which here is 0.2 s, tA = 48.6/360 × 0.2 s = 0.027 s.
Point C in the diagram occurs at point 1 on the reference circle but note that point C is more than one period T from t = 0. We need to calculate the time to rotate to point 1 but then add one period. The angle we need to rotate through is 360° − 221.4° = 138.6°. So tC = 138.6/360 × 0.2 s + 0.2 s = 0.277 s.

The equation for the velocity of an object undergoing SHM has the form v(t) = -vmaxsin(ωt+ϕ0), where vmax = ωA and ω = 2π/T. Examining the graph, we see that the period is T = 0.1 s, so ω = 20π s-1. Also the maximum velocity is 5 m/s. From this we determine that A = vmax/ω = (5 m/s)/( 20π s-1) = 1/(4π) m = 0.0796 m. Furthermore, the maximum acceleration is amax = ω2A = ωvmax = 100π m/s2.
To draw the reference circle note that the t = 0 velocity is positive (moving to the right) which only occurs when the object is in quadrants III and IV. Next note that the given v-t graph has the velocity going to a maximum, which occurs when the object passes through equilibrium. Thus the object is in the third quadrant.
We use the velocity equation, v(t) = -vmaxsin(ωt+ϕ0), at t = 0 to find the phase constant ϕ0. We already found ω = 20π s-1. Again we look at the value of the graph at t = 0 which is v(0) = 2.40 m/s. So we have 2.40 = -5sin(ϕ0), or sin(ϕ0) = -0.48. There are two angles on the unit circle that satisfy this, ϕ0 = -28.69° and ϕ0 = -151.31°. The second angle is in the third quadrant as is necessary. As a positive angle this is ϕ0 = 208.7° = 3.643 rad. Our equation is x(t) = (0.0796 m)cos(20πt + 3.643).
The spring constant is given by ω2 = K/m, so K = (20π s-1)2(2.00 kg) = 7896 N/m.
The total energy is Etotal = ½KA2 = 25 J.
To find when the object is at point A, maximum velocity to the right, note that the object must be at point 4 of the reference circle. So the object needs to rotate to 270° from 208.7°. Since rotating 360° takes one period which here is 0.1 s, tA = 61.3/360 × 0.1 s = 0.0170 s.
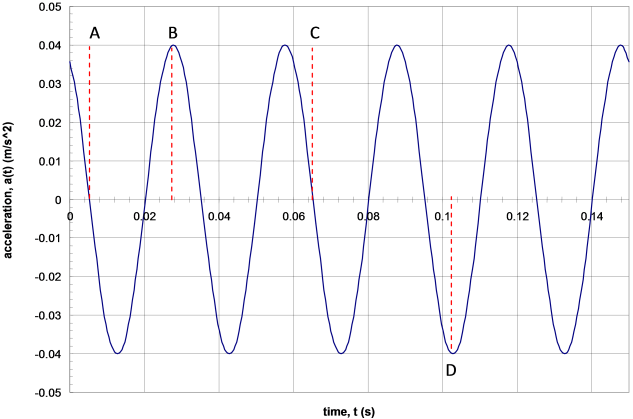
The equation for the acceleration of an object undergoing SHM is has the form a(t) = -amaxcos(ωt+ϕ0), where amax = ω2A and ω = 2π/T. Examining the graph, we see that the period is T = 0.030 s, so ω = 200π/3 s-1. Also the maximum acceleration is 0.040 m/s2. From this we deduce that A = amax/ω2 = (0.040 m/s2)/(200p/3 s-1)2 = 9.119 × 10-6 m. Furthermore, the maximum velocity is vmax = ωA = amax/ω = 1.9099 × 10-4 m/s.
To draw the reference circle note that the t = 0 acceleration is positive (moving to the right) which only occurs when the object is in quadrants II and III. Next note that the given a-t graph has the acceleration going to zero, which occurs when the object passes through equilibrium. Thus the object is in the third quadrant.
The acceleration equation for SHM is a(t) = −ω2Acos(ωt + ϕ0). We just found ω and A so all that is left to do is to find ϕ0. Again we look at the value of the graph at t = 0 which is a(0) = 0.035 m/s. So we have 0.035 = -0.040cos(ϕ0), or cos(ϕ0) = -0.875. There are two angles on the unit circle that satisfy this, ϕ0 = 151.04° and ϕ0 = -151.04°. The second angle is in the third quadrant, so it is the correct phase constant, 209.0° or 3.648 rad.
The position equation for SHM is x(t) = Acos(ωt + ϕ0). Using the values we found x(t) = (9.119 × 10-6 m)cos(200πt/3 + 3.648).
The spring constant is given by ω2 = K/m, so K = (200π/3 s-1)2(2.00 kg) = 87730 N/m.
The total energy is Etotal = ½KA2 = 3.65 × 10-6 J.
Point B is maximum positive acceleration, that occurs when the object is compressing the spring the most which is at point 3 on the reference circle diagram above. So the object needs to rotate counterclockwise to 180° from 209.0° which is 331.0°. Since rotating 360° takes one period which here is 0.030 s, tB = 331/360 × 0.030 s = 0.0276 s.
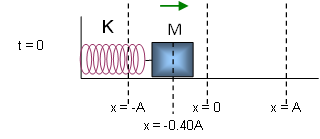
To draw the reference circle note that the t = 0 position is negative and the velocity is positive (moving to the right) which only occurs when the object is in quadrants III.
We can take the general equation, x = Acos(ωt + ϕ0) and substitute in the t = 0 values to find ϕ0.
which reduces to
or
Remember that your calculator will only give you one answer but there is also a second answer 360° minus the calulator answer.
Solving yields 113.6° (1.983 rad) or 246.4° (4.300 rad). The second answer is in the third quadrant and is thus the correct phase constant.
To sketch the x-t graph first note that the t = 0 position is -0.40A and that the velocity is positive v = ωAand that the object on the reference circle will rotate next to point 4, which has x = 0. So graph must rise through x = 0.

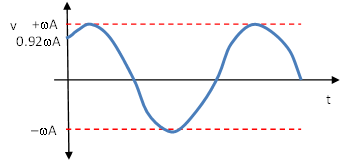
To sketch the v-t graph first note that the t = 0 velocity is positive and has value v = −ωAsin(ϕ0) = 0.9164ωA .When the object rotates to position 4, equilibrium velocity will be a maximum. So the velocity has risen.

The phase constant ϕ0 is measured from the positive x axis. Thus ϕ0 = 240° = 4π/3.
To sketch the x-t graph, we need to know the t = 0 position. Here x(0) = Acos(240°) = −½A. To determine the behaviour for t > 0, note that the object in the reference circle rotates counterclockwise and will reach equilibrium, x = 0.
To sketch the v-t graph, we need to know the t = 0 velocity. Here v(0) = −ωAsin(240°) = +0.866ωA. To determine the behaviour for t > 0, now that the object in the reference circle rotates counterclockwise and will reach equilibrium, x = 0, where the velocity is positive maximum v = +ωA.

The object has to rotate through 30° counterclockwise to reach equilibrum. Since a rotation of 360° takes one period T, this object will reach equilibrium in time t = 30/360 × T = T/12. We just need to know the period T. Since ω2 = K/M, ω = 15 rad/s. Now T = 2π/ω = 0.419 s. So the object reaches equilibrium in t = (= 0.419 s)/12 = 0.0349 s.
An examination of our relationships for SHM indicates
that the velocity of a particle is at a maximum as it goes through
equilibrium. So the problem has given use the maximum velocity.
As well we have vmax = ωA,
and ω = [K/m]½, so
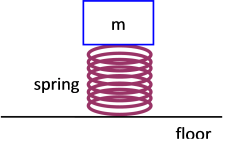
The problem tells us that the block loses contact with the spring. That means the normal acting on the block goes to zero. Typically, for problems involving forces we draw the FBD and apply Newton's Second Law. However, we have always avoided doing this with springs because we are dealing with a non−constant force and a non−constant acceleration. We don't have this difficulty in this problem because we are told that the spring is at maximum extension, and thus we know that the acceleration is amax = ω2A downwards.
 |
|
| ΣFy = may | |
| N − mg = −mω2A |
The equation we have is
Setting N = 0, and rearranging yields
Our relationships for SHM tell us that ω
= [K/m]½, so
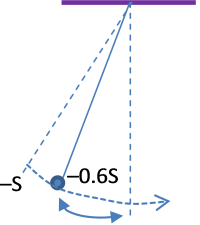
The object has a negative position and is moving to the right so it must be in quadrant III on the reference circle.
insert diagram
We can take the general equation, s = Scos(ωt + ϕ0) and substitute in the t = 0 values to find ϕ0.
which reduces to
or
Remember that your calculator will only give you one answer but there is also a second answer 360° minus the calulator answer.
Solving yields 126.9° (2.214 rad) or 233.4° (4.069 rad). The second answer is in the third quadrant and is thus the correct phase constant.
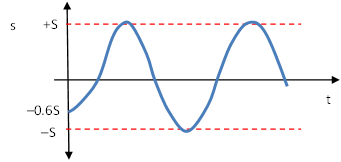
To sketch the x-t graph first note that the t = 0 position is -0.60S and that the velocity is positive v = ωA and that the object on the reference circle will rotate next to point 4, which has x = 0. So graph must rise through x = 0.
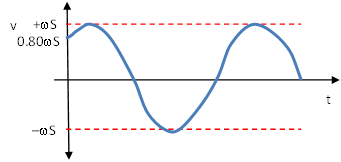
To sketch the v-t graph first note that the t = 0 velocity is positive and has value v = −ωSsin(ϕ0) = 0.8028ωS. When the object rotates to position 4, equilibrium velocity will be a maximum. So the velocity has risen.

Examining the motion we see that the object swings for half the
motion on a string of length L, and the other half as a string
of length L/n. From the period of a pendulum, we know how long
each of these motion are. Therefore the total time is
My thanks to C. Kufazvinei and F. Z. Mavhunga for pointing out a previous typographical error in the above equation.
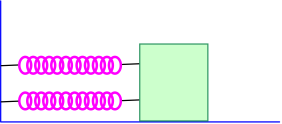
(a) The fact that we are looking for ω indicates an SHM problem. It is not the simple one spring and block system we studied since there are two springs. However energy methods let us handle everything since we know Ef = Ei, hence we have
Solving for v yields  .
.
(b) Now this is the maximum velocity of the block and we know for SHM that
vmax = ωA. So  .
.
(c) For a single spring we know  . Since
ω and M are the same, Keffective =
2K. We replace the two springs with a single spring with twice the spring constant.
. Since
ω and M are the same, Keffective =
2K. We replace the two springs with a single spring with twice the spring constant.
(d) We found for the two parallel springs and block but we want the same ω as for the single spring and block result  . If we double the mass from M to 2M for the two spring system, the 2's will cancel and we will have the same ω.
. If we double the mass from M to 2M for the two spring system, the 2's will cancel and we will have the same ω.
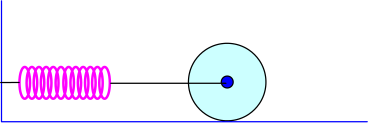
(a) The fact that we are looking for ω indicates an SHM problem. It is not that simple a spring and block system since there is also rolling. However energy methods let us handle everything since we know Ef = Ei, hence we have
For a disk, I = ½Mr2. Since it is rolling, ωrolling = v/r. The above equation reduces to
Solving for v yields  .
.
(b) Now this is the maximum velocity of the block and we know for SHM that
vmax = ωA. So
 .
.
(c) We found that for the single spring and rolling disk. If we had the spring and a block the result would have been . We would need to increase the spring constant in the spring-disk system to increase ω to the same value as the spring-block system. To get rid of the fraction 2/3 in our spring-disk system we need Knew = 3/2K.
(d) We found that for the single spring and rolling disk. If we had the spring and a block the result would have been . We would need to decrease the mass in the spring-disk system to increase ω to the same value as the spring-block system. To get rid of the fraction 2/3 in our spring-disk system we need Mnew = 2/3M.
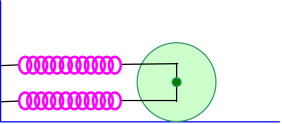
(a) The fact that we are looking for ω indicates an SHM problem. It is not a simple single spring and block system since there is also rolling. However energy methods let us handle everything since we know Ef = Ei, hence we have
For a solid sphere, I = 2/5Mr2. Since it is rolling, ωrolling = v/r. The above equation reduces to
Solving for v yields 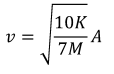 .
.
(b) Now this is the maximum velocity of the block and we know for SHM that
vmax = ωA. So  .
.
(c) We found that for the double spring and rolling disk. If we had a spring and a block system, the result would have been . We would need to decrease the spring constant in the double spring-disk system to decrease ω to the same value as the spring-block system. To get rid of the fraction 10/7 in our double spring-disk system equation we need Knew = 7/10K.
(d) We found that for the double spring and rolling disk. If we had a spring and a block system, the result would have been . We would need to increase the mass in the double spring-disk system to decrease ω to the same value as the spring-block system. To get rid of the fraction 10/7 in our double spring-disk system equation we need Mnew = 10/7M.
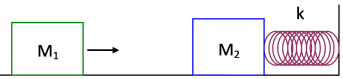
First we have a totally inelastic collision, so
This tells us that
This is the maximum velocity of the double−block SHM.
(a) From our relations for SHM, we know that ω = [K/m]½, so
(b) From the SHM relations, we also know vmax = ωA, so the maximum compression is
(c) The maximum acceleration is given by amax = ω2A, so
Questions? mike.coombes@kpu.ca
![[Return to Kwantlen Homepage]](http://www.kpu.ca/images/return_button.gif)